

服务咨询
全天高效服务

- Tel:13533491614
精确时间协议的弹性的一个关键是最佳master主时钟算法,或称BMCA。 BMCA允许一个时钟在前一个master时钟失去其GPS、因开关故障而断开连接或因任何原因无法继续担任master时钟时自动接管主时钟的职责。
为了理解这一点,请考虑普通时钟的一天的工作情况。在上一篇文章中,一个普通时钟可以被设计成能够作为一个主时钟或一个从时钟。 这个时钟可以处于的状态如下图所示:
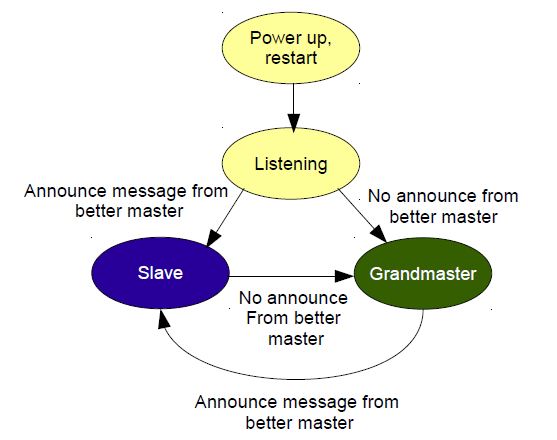
上电后,时钟做的第一件事是 “listen-监听”,换句话说,它寻找来自PTP通用组播地址的Announce信息。 Announce信息包含发送它的时钟的属性。 如果普通时钟看到来自更好的时钟的Announce消息,它就会进入从属状态,如果它不具备从属能力,则进入被动状态。 如果普通时钟在Announce时间间隔内没有看到来自更好的时钟的Announce信息,那么它就会接管主时钟的角色。 这将持续运行,因此支持主控的设备会持续关注当前主时钟可能丢失的情况。 由于这个原因,在你的网络中,Announce Time Out Interval的设置必须长于Announce Interval。 如果你不这样做,那么具有主控能力的设备将不断跳出结论,认为主控时钟已经消失,他们需要接管。 这就像一群在脱口秀中的专家,他们从来不听,一直在互相争论。
接下来我们花3分钟讲讲,是什么让一个master比另一个更好。
最后一个复杂的问题是 “Steps Removed”。如果两个边界时钟从同一个主站获得时间,那么通过较少的边界时钟连接到主站的那个时钟会更好。 透明时钟不会对Steps Removed做出贡献,因为它们是透明的。
尊敬的客户及合作伙伴:
感谢您长期以来对艾体宝的关注与支持!为提供更优质、稳定的服务体验,我们已完成官网的全面迁移升级,现正式启用全新平台。
新官网地址:https://www.itbigtec.com/
如您遇到任何访问或使用问题,请随时联系我们的技术支持团队:13533491614
感谢您的理解与配合!我们将持续优化产品与服务,期待为您创造更多价值。
艾体宝团队